გამოიწერეთ ჩვენი სოციალური ქსელები სწრაფი პოსტებისთვის
ინოვაციური ტექნოლოგიური მიღწევების ეპოქაში, ნავიგაციის სისტემები ფუნდამენტურ საყრდენებად იქცა, რამაც მრავალი მიღწევა განაპირობა, განსაკუთრებით სიზუსტის კრიტიკულ სექტორებში. რუდიმენტული ციური ნავიგაციიდან დახვეწილ ინერციულ ნავიგაციურ სისტემებამდე (INS) მოგზაურობა განასახიერებს კაცობრიობის დაუღალავ მცდელობებს კვლევისა და ზუსტი სიზუსტისკენ. ეს ანალიზი ღრმად ჩადის INS-ის რთულ მექანიკაში, იკვლევს ბოჭკოვანი ოპტიკური გიროსკოპების (FOG) უახლეს ტექნოლოგიას და პოლარიზაციის გადამწყვეტ როლს ბოჭკოვანი მარყუჟების შენარჩუნებაში.
ნაწილი 1: ინერციული ნავიგაციის სისტემების (INS) გაშიფვრა:
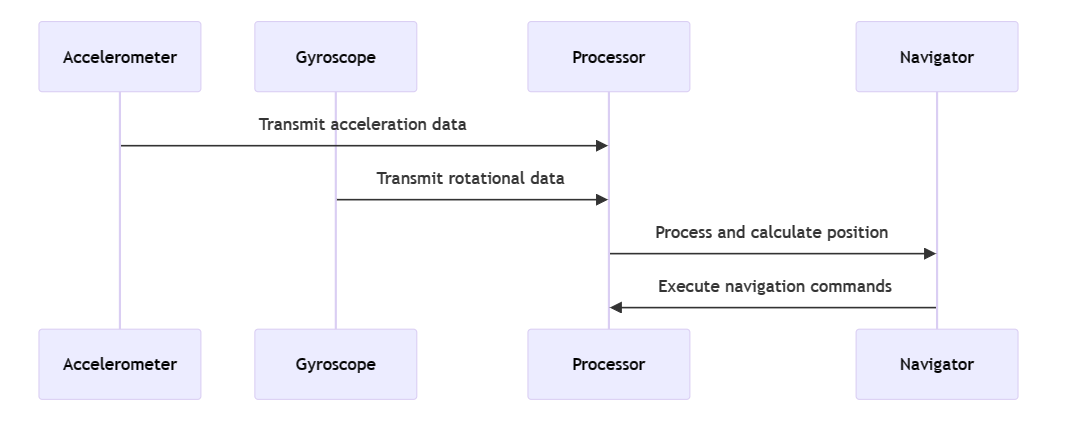
ინერციული ნავიგაციის სისტემები (INS) გამოირჩევა, როგორც ავტონომიური ნავიგაციის დამხმარე საშუალებები, რომლებიც ზუსტად ითვლიან სატრანსპორტო საშუალების პოზიციას, ორიენტაციას და სიჩქარეს, გარე სიგნალებისგან დამოუკიდებლად. ეს სისტემები ჰარმონიზებენ მოძრაობისა და ბრუნვის სენსორებს და შეუფერხებლად ინტეგრირდებიან საწყისი სიჩქარის, პოზიციისა და ორიენტაციის გამოთვლით მოდელებთან.
არქეტიპული INS მოიცავს სამ კარდინალურ კომპონენტს:
· აქსელერომეტრები: ეს კრიტიკული ელემენტები აფიქსირებენ ავტომობილის წრფივ აჩქარებას, მოძრაობას გაზომვად მონაცემებად გარდაქმნიან.
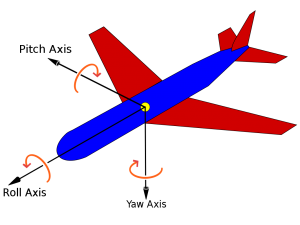
· გიროსკოპები: კუთხური სიჩქარის განსაზღვრის ინტეგრალი, ეს კომპონენტები სისტემის ორიენტაციისთვის საკვანძოა.
· კომპიუტერული მოდული: INS-ის ცენტრალური ნაწილი, რომელიც ამუშავებს მრავალმხრივ მონაცემებს რეალურ დროში პოზიციური ანალიტიკის მისაღებად.
გარე დარღვევების მიმართ INS-ის იმუნიტეტი მას თავდაცვის სექტორებში შეუცვლელს ხდის. თუმცა, ის ებრძვის „დრიფტს“ - სიზუსტის თანდათანობით დაქვეითებას, რაც მოითხოვს დახვეწილ გადაწყვეტილებებს, როგორიცაა სენსორების შერწყმა შეცდომების შესამცირებლად (ჩატფილდი, 1997).
ნაწილი 2. ბოჭკოვანი ოპტიკური გიროსკოპის მუშაობის დინამიკა:
ბოჭკოვანი ოპტიკური გიროსკოპები (FOG) ბრუნვითი სენსორების ტრანსფორმაციულ ერას აუწყებს, რომელიც სინათლის ინტერფერენციას იყენებს. სიზუსტის გამო, FOG-ები სასიცოცხლოდ მნიშვნელოვანია კოსმოსური აპარატების სტაბილიზაციისა და ნავიგაციისთვის.
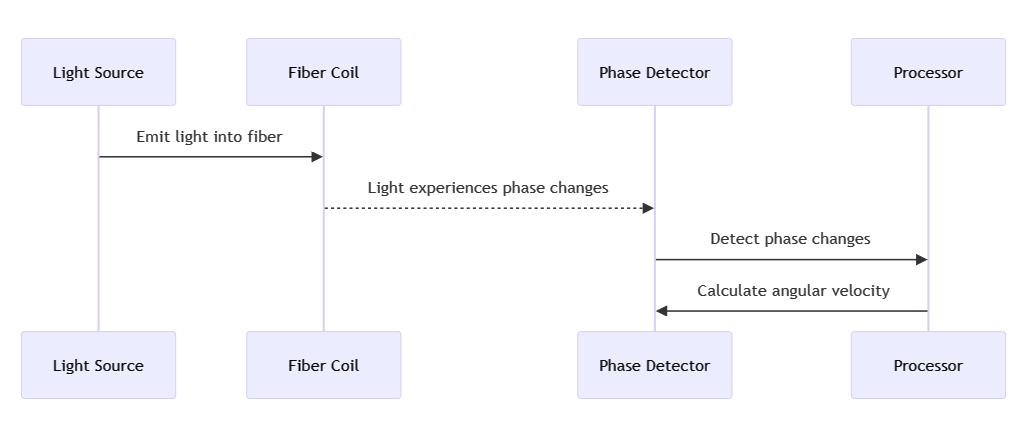
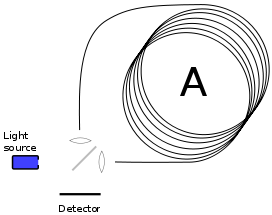
FOG-ები მოქმედებენ სანიაკის ეფექტზე, სადაც სინათლე, მბრუნავ ბოჭკოვან ხვეულში საპირისპირო მიმართულებით მოძრაობს, ავლენს ფაზურ წანაცვლებას, რომელიც კორელაციაშია ბრუნვის სიჩქარის ცვლილებებთან. ეს ნიუანსირებული მექანიზმი ზუსტ კუთხურ სიჩქარის მეტრიკაში ითარგმნება.
აუცილებელი კომპონენტები მოიცავს:
· სინათლის წყარო: საწყისი წერტილი, როგორც წესი, ლაზერი, რომელიც იწყებს თანმიმდევრული სინათლის მოგზაურობას.
· ბოჭკოვანი ხვეულიდახვეული ოპტიკური მილი ახანგრძლივებს სინათლის ტრაექტორიას, რითაც აძლიერებს სანიაკის ეფექტს.
· ფოტოდეტექტორი: ეს კომპონენტი არჩევს სინათლის რთულ ინტერფერენციულ ნიმუშებს.
ნაწილი 3: პოლარიზაციის მნიშვნელობა ბოჭკოვანი მარყუჟების შენარჩუნებისას:
პოლარიზაციის შემანარჩუნებელი (PM) ბოჭკოვანი მარყუჟები, რომლებიც FOG-ებისთვის აუცილებელია, უზრუნველყოფენ სინათლის ერთგვაროვან პოლარიზაციის მდგომარეობას, რაც ინტერფერენციული ნიმუშის სიზუსტის მთავარი განმსაზღვრელი ფაქტორია. ეს სპეციალიზებული ბოჭკოები, რომლებიც პოლარიზაციის რეჟიმის დისპერსიას ებრძვიან, აძლიერებენ FOG-ის მგრძნობელობას და მონაცემთა ავთენტურობას (კერსი, 1996).
PM ბოჭკოების შერჩევა, რომელიც განპირობებულია ოპერაციული მოთხოვნილებებით, ფიზიკური მახასიათებლებითა და სისტემური ჰარმონიით, გავლენას ახდენს ზოგადი შესრულების მეტრიკაზე.
ნაწილი 4: გამოყენება და ემპირიული მტკიცებულება:
FOG-ები და INS-ები მრავალფეროვან გამოყენებაში პოულობენ რეზონანსს, უპილოტო საჰაერო თავდასხმების ორგანიზებიდან დაწყებული, გარემოს არაპროგნოზირებადობის პირობებში კინემატოგრაფიული სტაბილურობის უზრუნველყოფით დამთავრებული. მათი საიმედოობის დასტურია NASA-ს მარსმავალებში მათი განლაგება, რაც ხელს უწყობს უსაფრთხო არამიწიერი ნავიგაციის უზრუნველყოფას (Maimone, Cheng, and Matthies, 2007).
ბაზრის ტრაექტორიები ამ ტექნოლოგიებისთვის მზარდ ნიშას პროგნოზირებს, კვლევის ვექტორებით, რომლებიც მიზნად ისახავს სისტემის მდგრადობის, ზუსტი მატრიცების და ადაპტირების სპექტრების გაძლიერებას (MarketsandMarkets, 2020).

რგოლისებრი ლაზერული გიროსკოპი
სანიაკის ეფექტის საფუძველზე ბოჭკოვანი ოპტიკური გიროსკოპის სქემა
ცნობები:
- ჩატფილდი, ალბერტა, 1997.მაღალი სიზუსტის ინერციული ნავიგაციის საფუძვლები.ასტრონავტიკისა და ასტრონავტიკის პროგრესი, ტ. 174. რესტონი, ვირჯინია: ამერიკის აერონავტიკისა და ასტრონავტიკის ინსტიტუტი.
- კერსი, ად და სხვ., 1996. „ბოჭკოვანი ოპტიკური გიროსკები: ტექნოლოგიური განვითარების 20 წელი“,IEEE-ს შრომები,84(12), გვ. 1830-1834.
- მაიმონე, მ.ვ., ჩენგი, ი. და მათისი, ლ., 2007. „მარსის შემსწავლელი როვერების ვიზუალური ოდომეტრია - ინსტრუმენტი ზუსტი მართვისა და სამეცნიერო გამოსახულების უზრუნველსაყოფად“,IEEE-ს რობოტიკისა და ავტომატიზაციის ჟურნალი,14(2), გვ. 54-62.
- MarketsandMarkets, 2020. „ინერციული ნავიგაციის სისტემების ბაზარი კლასის, ტექნოლოგიის, გამოყენების, კომპონენტის და რეგიონის მიხედვით - გლობალური პროგნოზი 2025 წლამდე“.
პასუხისმგებლობის შეზღუდვა:
- ამით ვაცხადებთ, რომ ჩვენს ვებსაიტზე განთავსებული გარკვეული სურათები შეგროვებულია ინტერნეტიდან და ვიკიპედიიდან განათლების ხელშეწყობისა და ინფორმაციის გაზიარების მიზნით. ჩვენ პატივს ვცემთ ყველა ორიგინალური შემქმნელის ინტელექტუალური საკუთრების უფლებებს. ეს სურათები გამოიყენება კომერციული სარგებლის მიღების მიზნით.
- თუ ფიქრობთ, რომ გამოყენებული ნებისმიერი კონტენტი არღვევს თქვენს საავტორო უფლებებს, გთხოვთ, დაგვიკავშირდეთ. ჩვენ მზად ვართ მივიღოთ შესაბამისი ზომები, მათ შორის სურათების წაშლა ან სათანადო ატრიბუციის მითითება, რათა უზრუნველვყოთ ინტელექტუალური საკუთრების კანონმდებლობისა და რეგულაციების დაცვა. ჩვენი მიზანია შევინარჩუნოთ კონტენტით მდიდარი, სამართლიანი და სხვების ინტელექტუალური საკუთრების უფლებების პატივისცემით სავსე პლატფორმა.
- გთხოვთ, დაგვიკავშირდეთ შემდეგი საკონტაქტო მეთოდით,email: sales@lumispot.cnჩვენ ვიღებთ ვალდებულებას, რომ ნებისმიერი შეტყობინების მიღებისთანავე დაუყოვნებლივ ვიმოქმედოთ და უზრუნველვყოფთ 100%-იან თანამშრომლობას ასეთი საკითხების გადასაჭრელად.
გამოქვეყნების დრო: 2023 წლის 18 ოქტომბერი